Санкт-Петербург
не верифицирован
- Работ в портфолио: 10
- Типовых услуг: 0
- Работ на продажу: 0
- Зарегистрирован: 20.05.2020
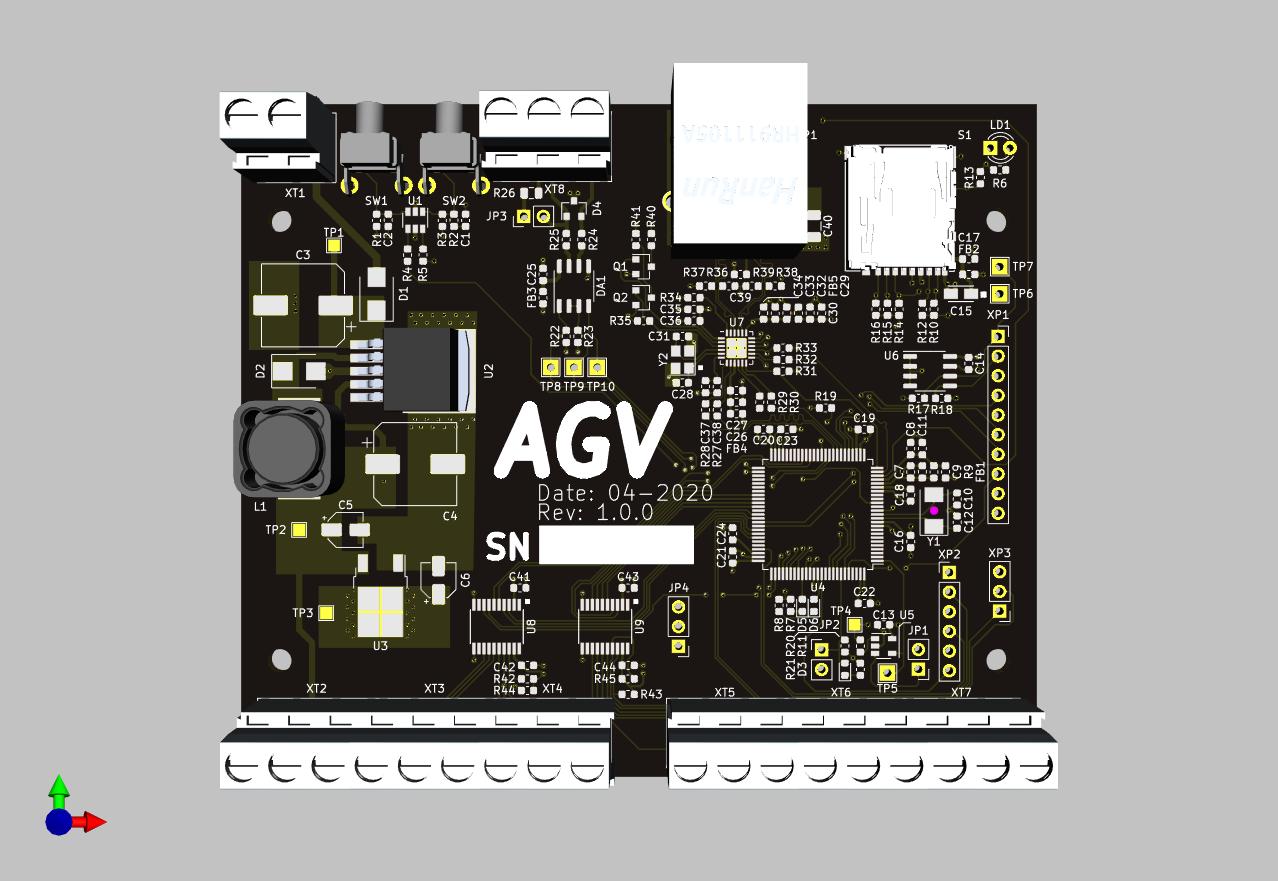
Контроллер дифференциального рулевого управления для автономной колёсной платформы. Реализован на базе микроконтроллера STM32F4xx коммуникация по Ethernet, интеграция с Robot Operating System (ROS).