Москва
не верифицирован
- Активность:
- Работ в портфолио: 9
- Типовых услуг: 0
- Работ на продажу: 0
- Зарегистрирован: 02.12.2012
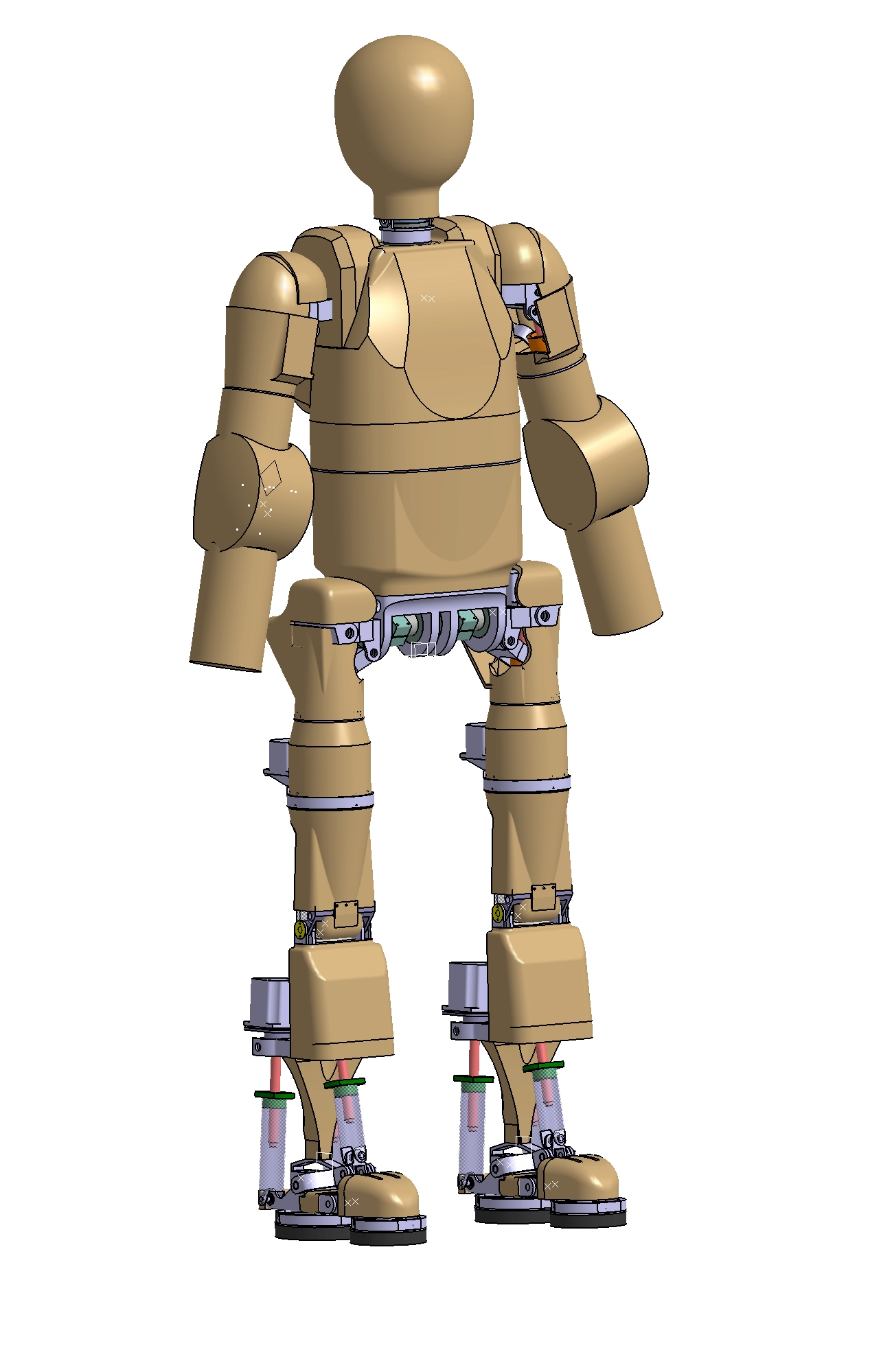
По заказу министерства образования разрабатывал антропоморфного робота. В роли рабочих приводов – шаговые двигатели, передаточные механизмами служили шариковинтовые пары. Была составлена 3д модель, рассчитаны и подобраны ключевые компоненты: датчики, двигатели, и т.д. С основными компонентами проводил предварительные испытания.