 нажмите для просмотра в полный размер")
Прикрепленные файлы:

Комментариев нет
оставить комментарий могут только авторизованные пользователи
| Предыдущая работа | Все работы автора | Подъёмник лабораторный |

Отзывы: 6
Претензии: 0
| Предыдущая работа | Все работы автора | Подъёмник лабораторный |
IntemsDD manager Приложение для настройки устройства управления робототехнической платформой. Реализована для платформ Android и iOS был использован фреймворк Flutter для обеспечения кроссплатформенности.
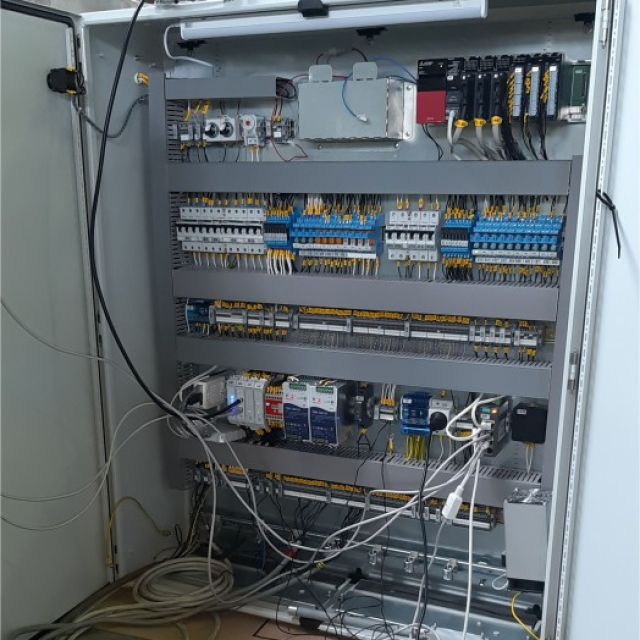
Crane monitor Система сбора и хранения информации кранового оборудования. Реализована на базе ОС Linux (консольное приложение) коммуникация с промышленными контроллерами Mitsubishi для сбора и анализа состояния исполнительных механизмов крана.
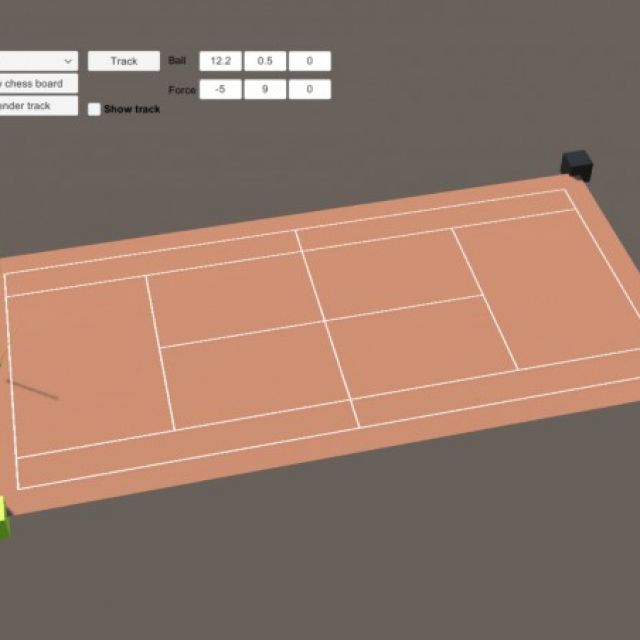
TennisEye SIM Симулятор полёта теннисного мяча (Unity/C#). Генерация и визуализация траектории полёта, сохранение видеофайлов с различных камер Unity.
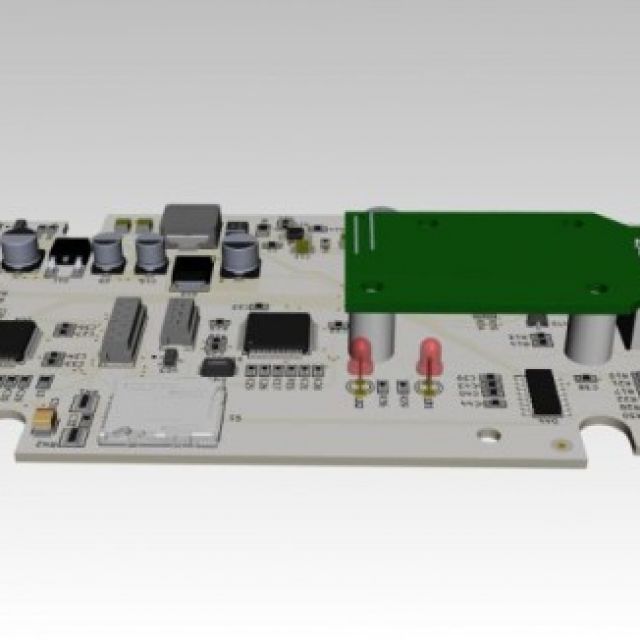
VendNFC Система интеграции вендингового аппарата с системой школьного питания glolime. Связь с серверами оператора по Ethernet, протокол работы с аппаратом MDB, для идентификации пользователя используются NFC-карты. Режим работы устройства 24/7
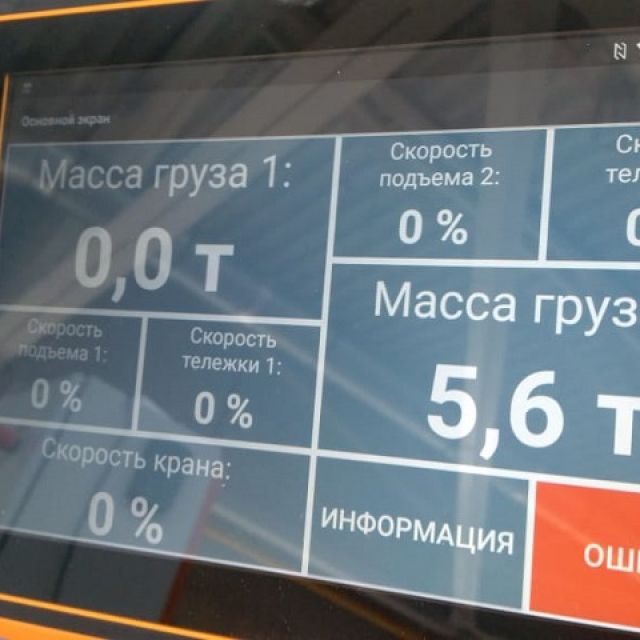
Система диагностики кран-балки Система диагностики состояния работы крана. Реализована для планшета на базе ОС Android, связь с "крановым сервером" по WiFi.
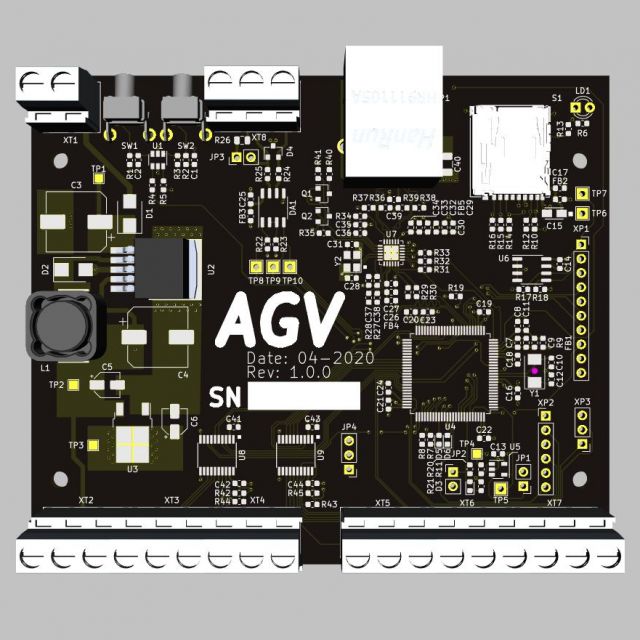
Контроллер AGV Контроллер дифференциального рулевого управления для автономной колёсной платформы. Реализован на базе микроконтроллера STM32F4xx коммуникация по Ethernet, интеграция с Robot Operating System (ROS).
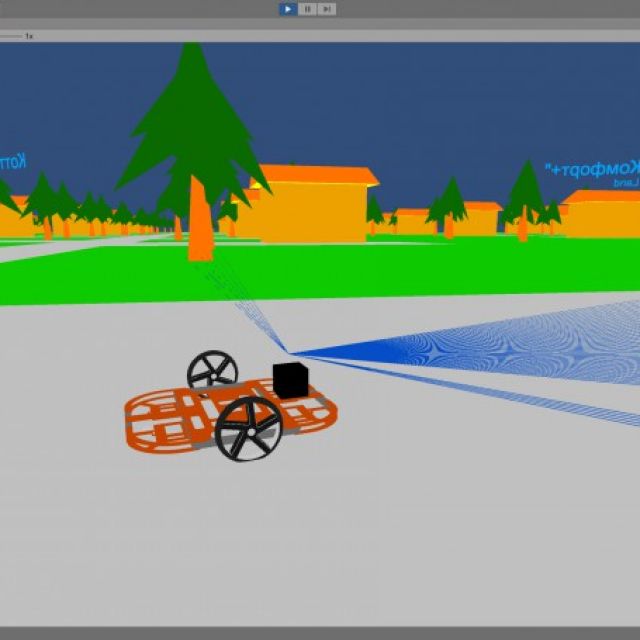
ROS-Unity SIM Симулятор на базе Unity для визуализации и тестирования алгоритмов поведения роботов.
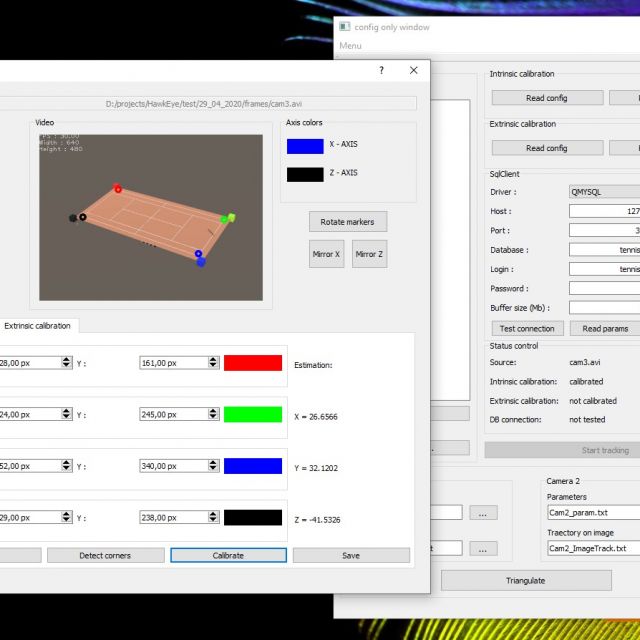
Tennis Eye Система детектирования теннисного мяча в видеопотоке. Трекер таектории теннисного мяча с восстановлением пространственных координат при помощи триангуляции на нескольких изображениях.